Let’s sequentially discuss topics from work and occupation, machine tools, java/groovy automation to the estimating the future of humanity.
You will find in this article information about personal computer-aided manufacturing in the in-home workshop, the way from the creator’s idea to the end/finished item. Let’s consider the following approach for the G-code instruction sending from the JVM and groovy/java to the NC machine tool to automatize features that do not exist in out-of-the-box system.
I hope this article will be useful for the programmers, who work with JVM, for those who is interested in the IoT, those who are familiar to DIY, those who have 3D printer or who is planning to buy it, those who made prototype of any system and run the software at the Raspberry PI/Beagleboard Black. Things I will tell about you could retry using the open source software and open hardware.
This post is written based on my conference report from Central & Eastern European Software Engineering Conference in Russia 2016 and my personal experience with hardware and software.
Introduction
Good morning ladies and gentlemen. Let me start by saying thanks to all of you to wake up this early in the weekend day and come to the conference\here. I'm happy to see you in the meeting room! We have not much time for the report, so there won't be question-answer section. But feel free to come and ask questions after the report. Also, there is an e-mail address at the last slide and I'll be glad to answer your questions this way too.
Your opinion on the report is very important to me. I would like to hold a meetup, where we can use in practice theory I will describe today, operate the NC machine tool. That will be open/free event and all who will be in Moscow at that time will be able to join up. I hope I will find a place to meetup any time soon and publish the information at the meetup.com. Those who are interested in it could write an e-mail to me and I will send you the event notification. The note to article: I will surely publish results of this meetup for the habrahabr readers, and you could be involved in it.
Here is a report "How to prevent the NC machine tool in the in-home workshop become cartoon characters "two twins from the box"". Who has watched the cartoon and remembers the plot?
Meeting room voice: «Everyone have (watched it) »
Great, so you are more or less familiar with the problem I will talk about. At the end of the report we'll try to control the machine using Java and Groovy.
One more questions for you. Who are using NC machine tools, work as an engineer, designer or technologist at the manufacture? Fortunately I hear negative responses. It makes the things easier for me and you will not troll me on this point. Those who use these technologies every day in production could find the price of the tools, the depth of subject immersion and my style of explanation hilarious.
Great, so you are more or less familiar with the problem I will talk about. At the end of the report we'll try to control the machine using Java and Groovy.
One more questions for you. Who are using NC machine tools, work as an engineer, designer or technologist at the manufacture? Fortunately I hear negative responses. It makes the things easier for me and you will not troll me on this point. Those who use these technologies every day in production could find the price of the tools, the depth of subject immersion and my style of explanation hilarious.
NC machine tools
What do we know about work?
The occupation of the man and his work always were settled/organized in two ways.
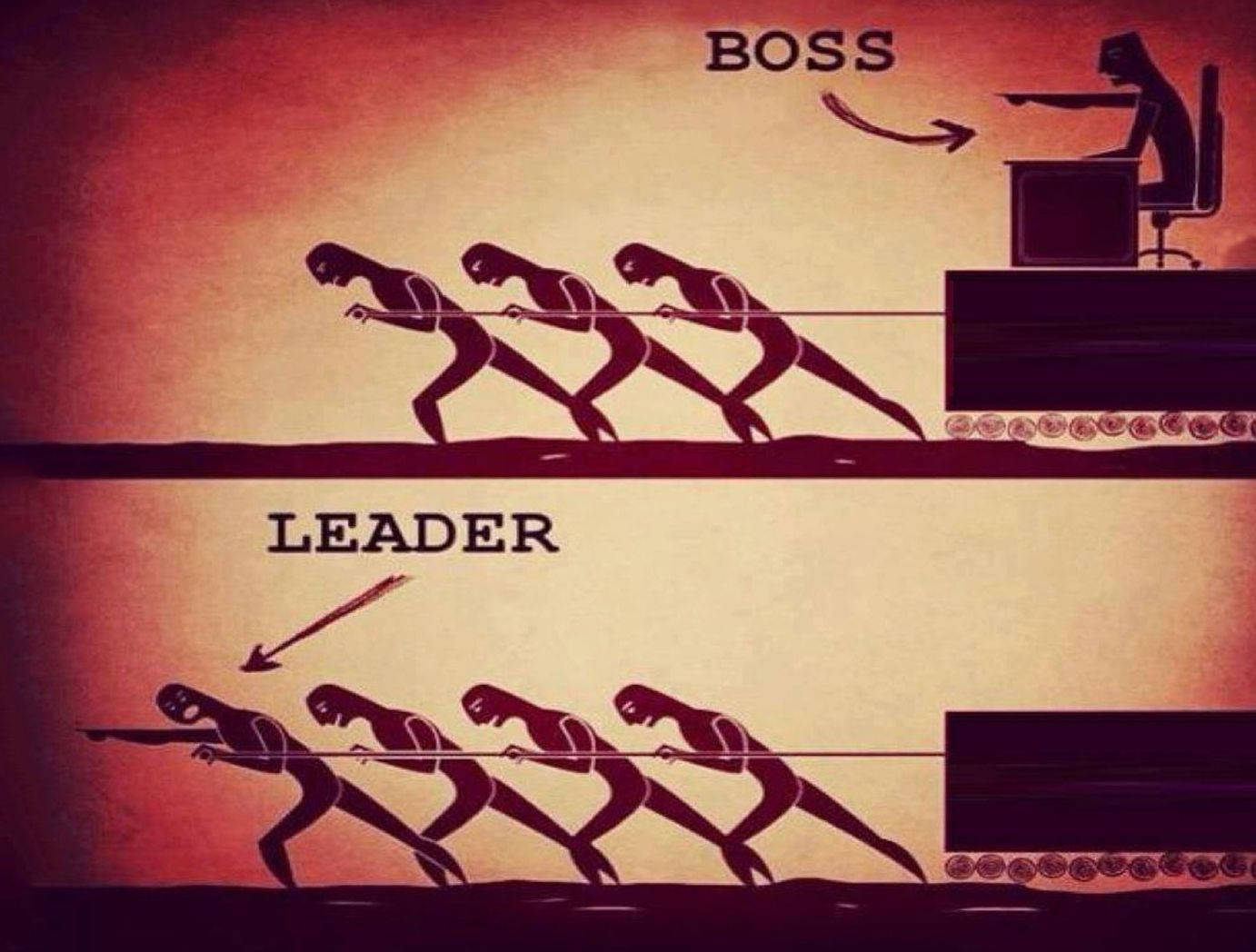
Either you control workers, or you get to work yourself and you make it with the others, sweat it out together.
Now new, more easy to use tools were developed by the inventors and engineers unlike the depicted situation.
Now new, more easy to use tools were developed by the inventors and engineers unlike the depicted situation.
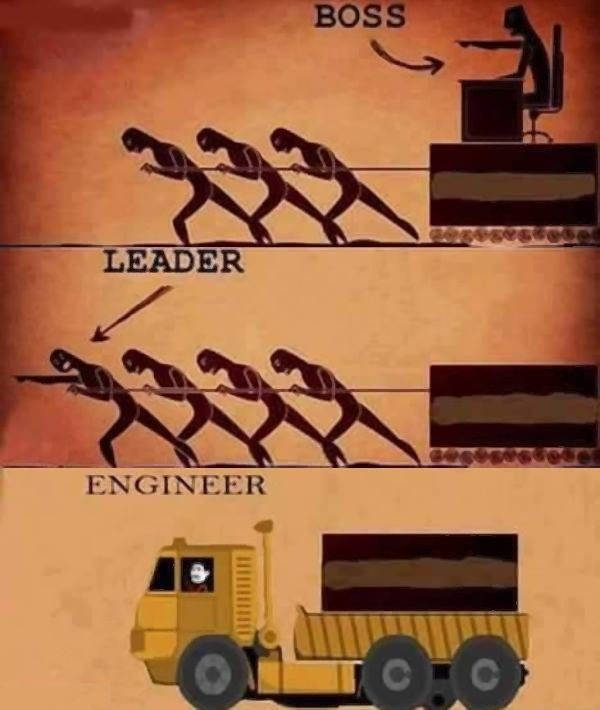
Technologies that make the work easier, life more pleasant and give people the opportunity to be occupied with more intellectual things and let the machines do the hard work.
There is an old cartoon «Vovka in the Far Away Kingdom». There was a boy in this story, who wanted his wishes to come true, but he didn’t want to make something himself and he didn’t want to learn anything.
There is an old cartoon «Vovka in the Far Away Kingdom». There was a boy in this story, who wanted his wishes to come true, but he didn’t want to make something himself and he didn’t want to learn anything.
In the Far Away Kingdom he has found two helpers, twins from the box. They were diligent and made literally everything instead of him, but not the way he waned.
Here is another cartoon "Wings, Feet and Tails".
The Chir pheasant was calling the Ostrich to the place where there were a lot of tasty things. When the Ostrich has started to run the Chir pheasant has stopped him with an “It's better to lose a day, then to fly in five minutes” phrase. When you have to do routine tasks you should think whether it is more effective to lose a day for its automation.
Now we’ll talk about technologies of 1970’s. These are machine tools controlled by the stored programs. Previously there were punched cards; currently the flash drives are being used. The automatic machines could be of different size, kinematic diagrams and equipped with different tools, that carries out materials processing at the manufacture/plant.
Now we’ll talk about technologies of 1970’s. These are machine tools controlled by the stored programs. Previously there were punched cards; currently the flash drives are being used. The automatic machines could be of different size, kinematic diagrams and equipped with different tools, that carries out materials processing at the manufacture/plant.
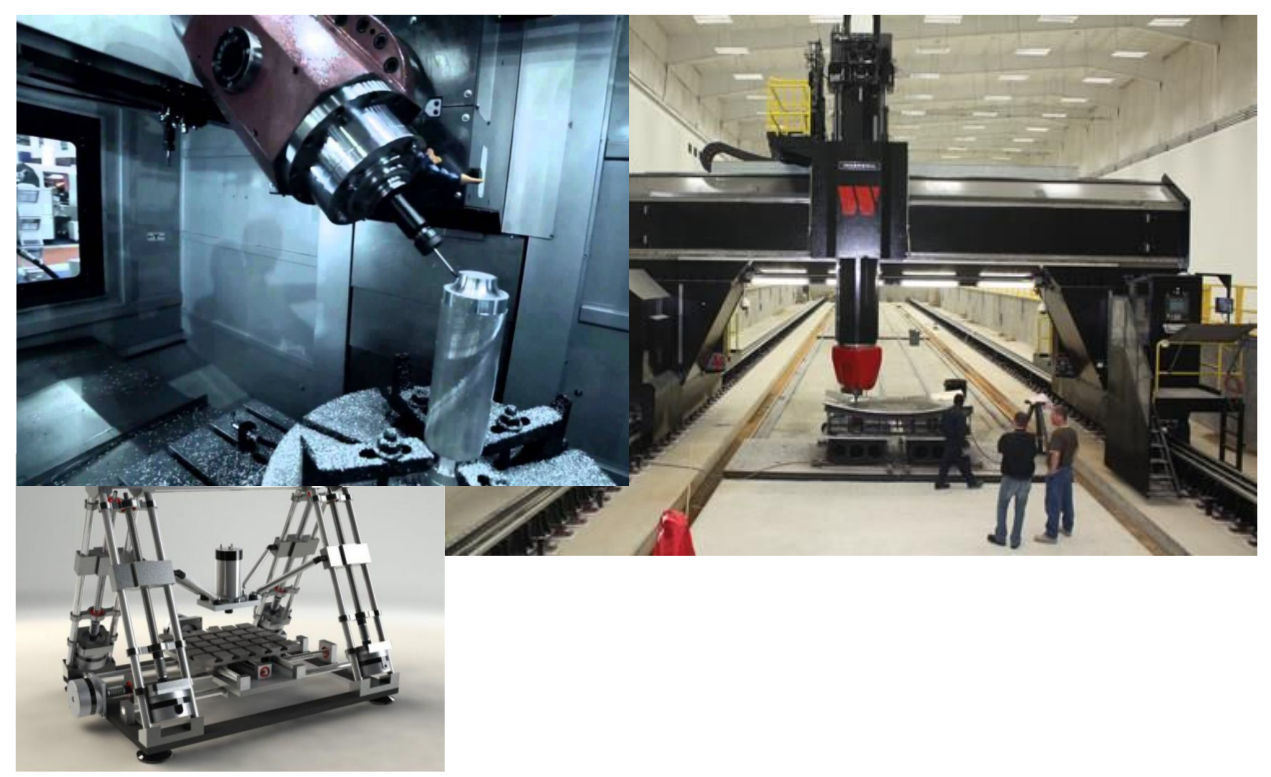
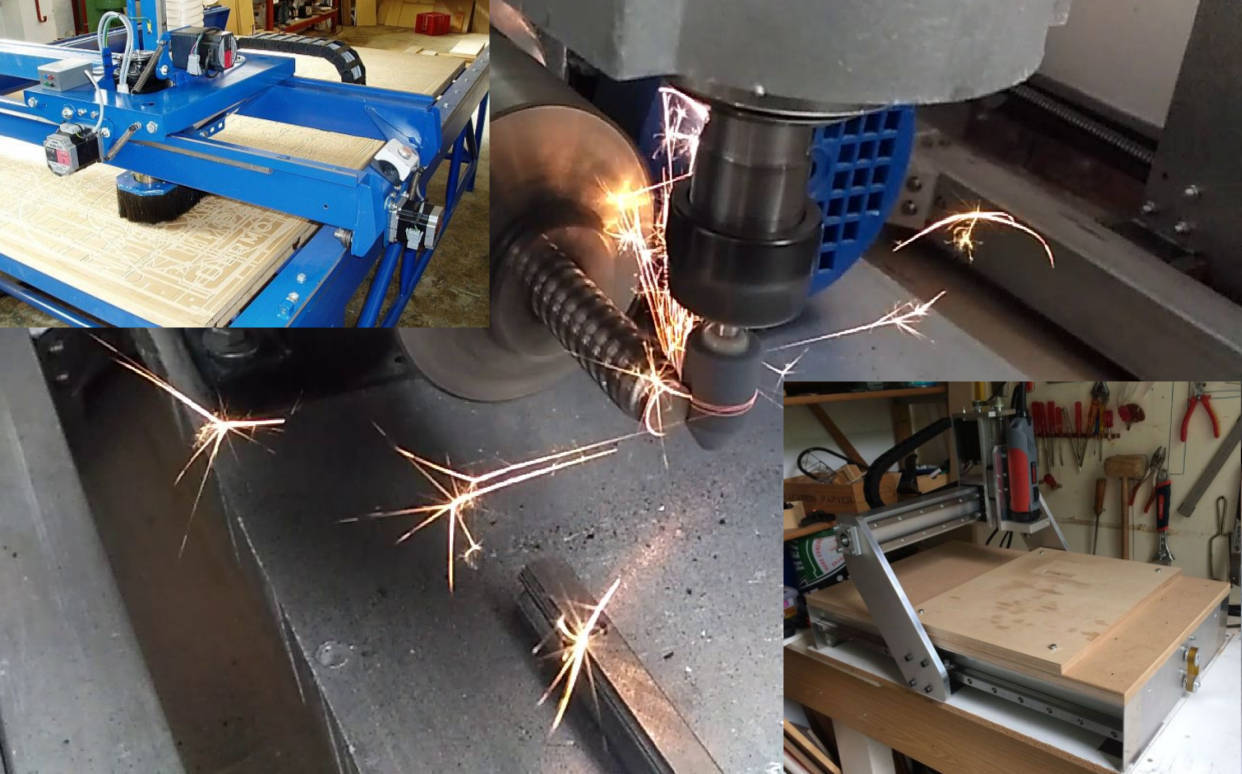
Things are simpler in the in-home workshop. Basically those machine tools are either AliExpress products, or products of the Russian import merchants, that rebrand the Celestial Empire's products. You can get whatever you want in the assembled condition or you can assemble the machine yourself from the spare parts.
If you don't want to spare your time and money, you have no experience, access to the machines for production of the portal frames; it will be easier for you to buy the ready-to-work machine. Also there are several projects: Shapeoko, MechMate CNC Router, Zenbot CNC etc.
What do you need the NC machine tool in your in-home workshop and what can you do with it? You can perform woodwork, machine ornamental panels for redecoration. Or you have a creative idea, and you could not find readymade details for it. You can also make a detail for some kind of consumer electronics. For example, spare part for the tea-kettle or the steamer from nonferrous metal if there spare parts are out of stock or there are not available in the service centers. You can do spare parts for the other NC machine, the same thing is for 3D printer, but you are not limited to plastics as a material of construction for the parts.
From the software point of view there is no much difference between NC machine tool, 3D printer or plotter. The operating tool differs but a lot of 3D printers are controlled the same way as the big industrial machines with the same instruction language.
There was a moment in the cartoon, when the Ostrich was running around but he could not fly up. The Chir pheasant keeps telling that wings are the best and the Ostrich insists that legs are. In the end the Lizard appears and tells that most important thing is the tail. Its tail has saved her life in the beginning of the cartoon.
What do you need the NC machine tool in your in-home workshop and what can you do with it? You can perform woodwork, machine ornamental panels for redecoration. Or you have a creative idea, and you could not find readymade details for it. You can also make a detail for some kind of consumer electronics. For example, spare part for the tea-kettle or the steamer from nonferrous metal if there spare parts are out of stock or there are not available in the service centers. You can do spare parts for the other NC machine, the same thing is for 3D printer, but you are not limited to plastics as a material of construction for the parts.
From the software point of view there is no much difference between NC machine tool, 3D printer or plotter. The operating tool differs but a lot of 3D printers are controlled the same way as the big industrial machines with the same instruction language.
There was a moment in the cartoon, when the Ostrich was running around but he could not fly up. The Chir pheasant keeps telling that wings are the best and the Ostrich insists that legs are. In the end the Lizard appears and tells that most important thing is the tail. Its tail has saved her life in the beginning of the cartoon.

While working with NC machine tool please be mindful of the danger for your life and safety and observe the safety procedures! NC machine tool includes cutting tool, solid shifting and rotating elements.
The contact with the frame of the electric drive is dangerous, especially if the insulation is damaged. Do not even try to extinguish with water the powered electric driver before cutting the power.
From the model to G-code
Almost every NC machine tool is operated with the G-code. This is a text command and data format that is a worldwide standard now. But some of its implementations for machines of different manufacturers have extensions that could make it impossible to port control software to the other machine.
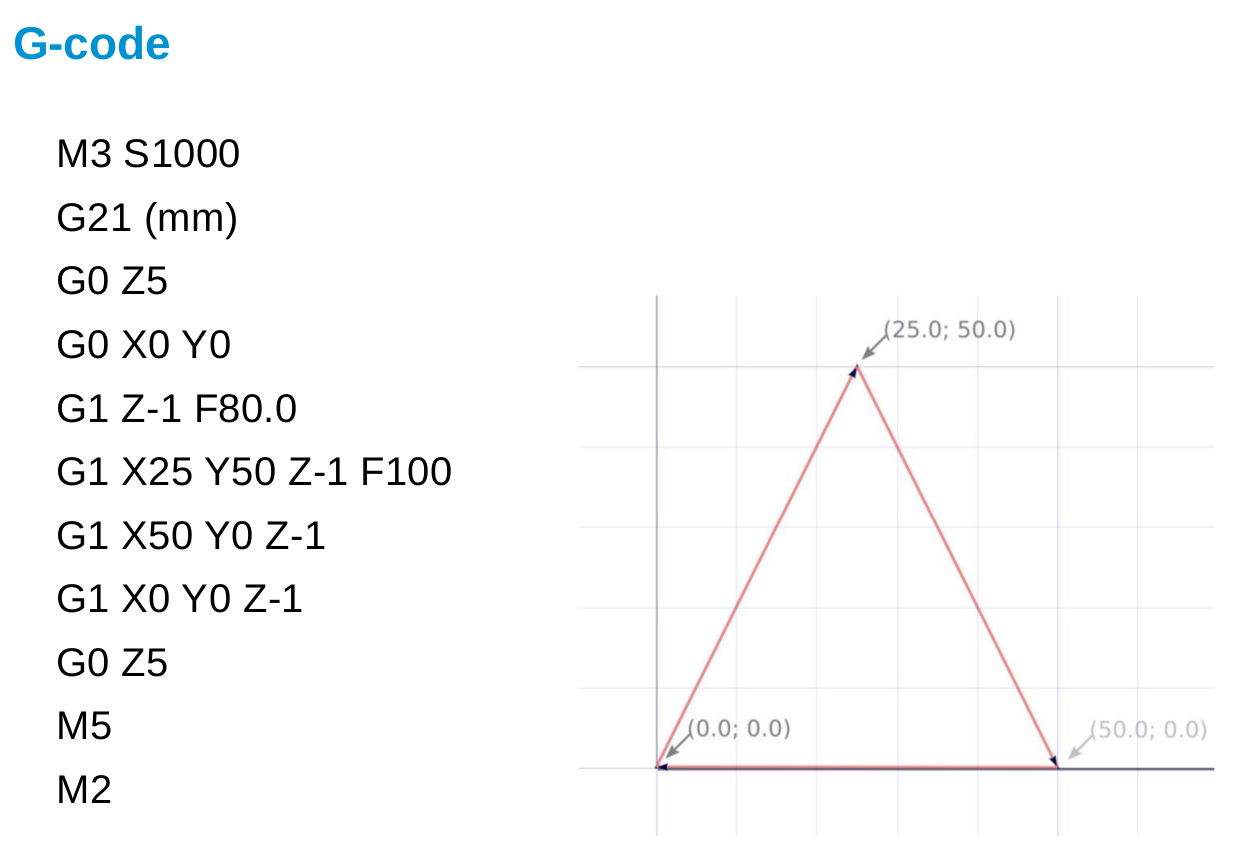
This example is really easy, but as a matter of fact the G-code is rare to be handwritten. Usually the any kind of model is made and on its base the control software is being created.
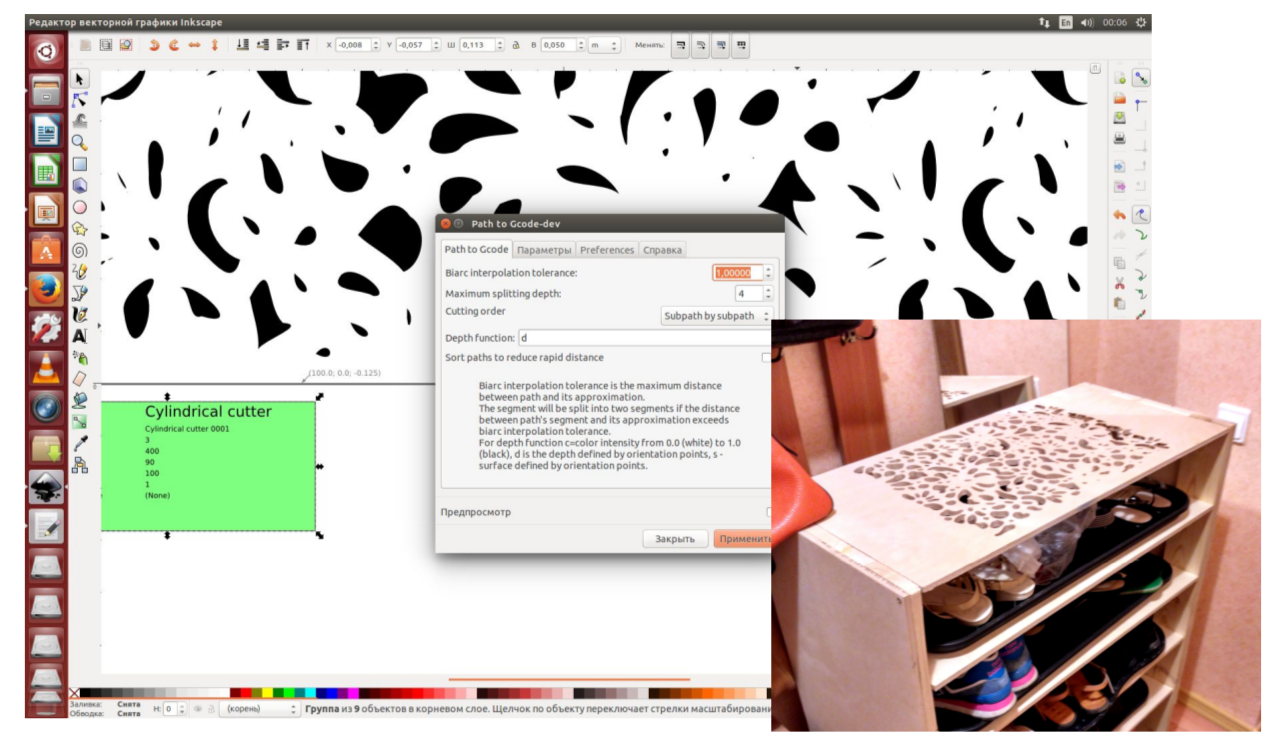
The path could be made in the drawing program, Inkskape for example, and in GCodeTools opensource software turns it into a g-code program for a machine tool. This approach is good for designers.
The path could be made in the drawing program, Inkskape for example, and in GCodeTools opensource software turns it into a g-code program for a machine tool. This approach is good for designers.
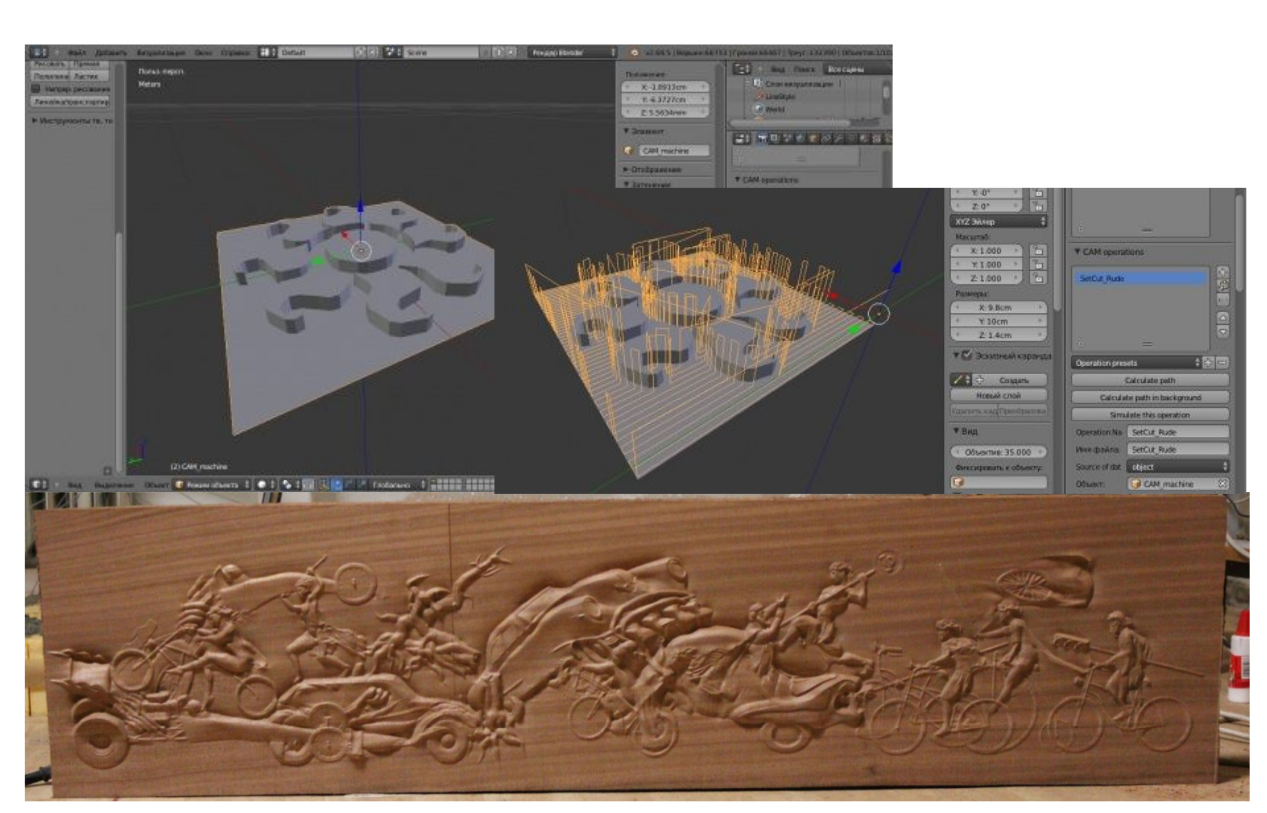
Those who get used to work with Blender, can convert the 3D object to the 2.5D object using the opensource BlenderCAM.
Industrial CAD systems with their prices over gazillion dollars are not accessible for a hobby-use. But the opensource software FreeCAD can be used.
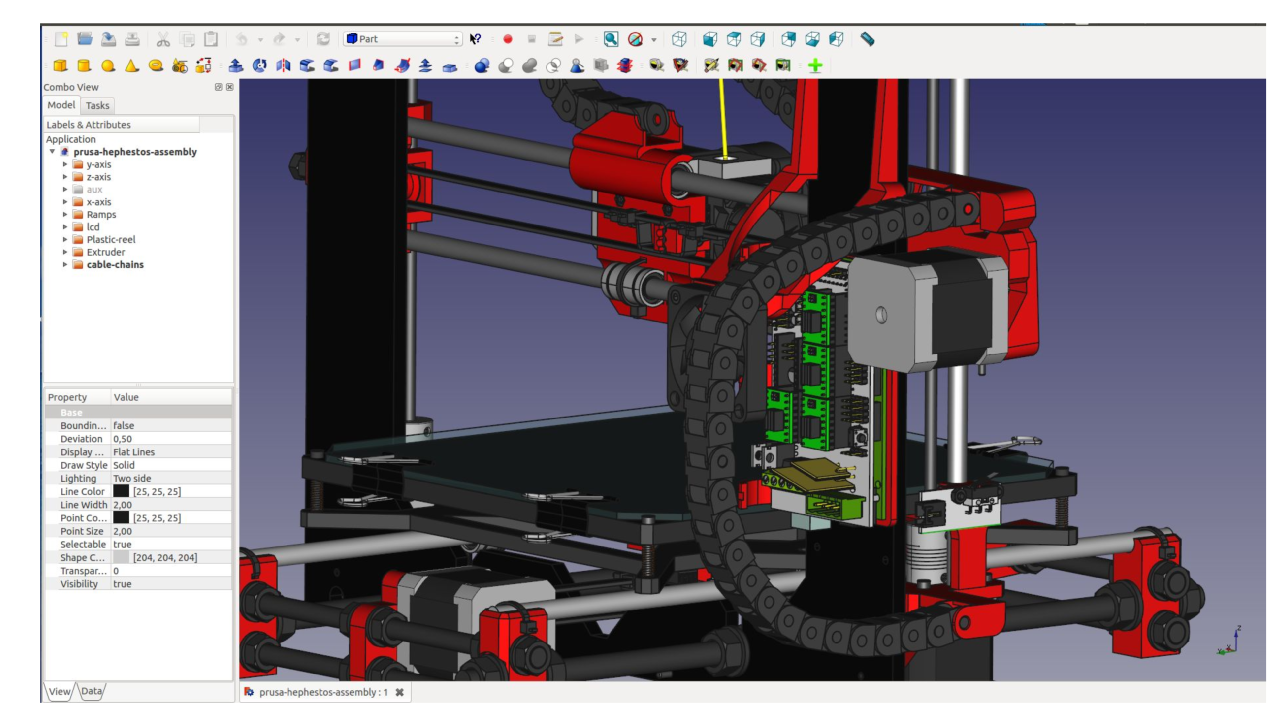
It is cannot be compared in ease and functionality with expensive CAD/CAM software suites, but it is sufficient for simple tasks.
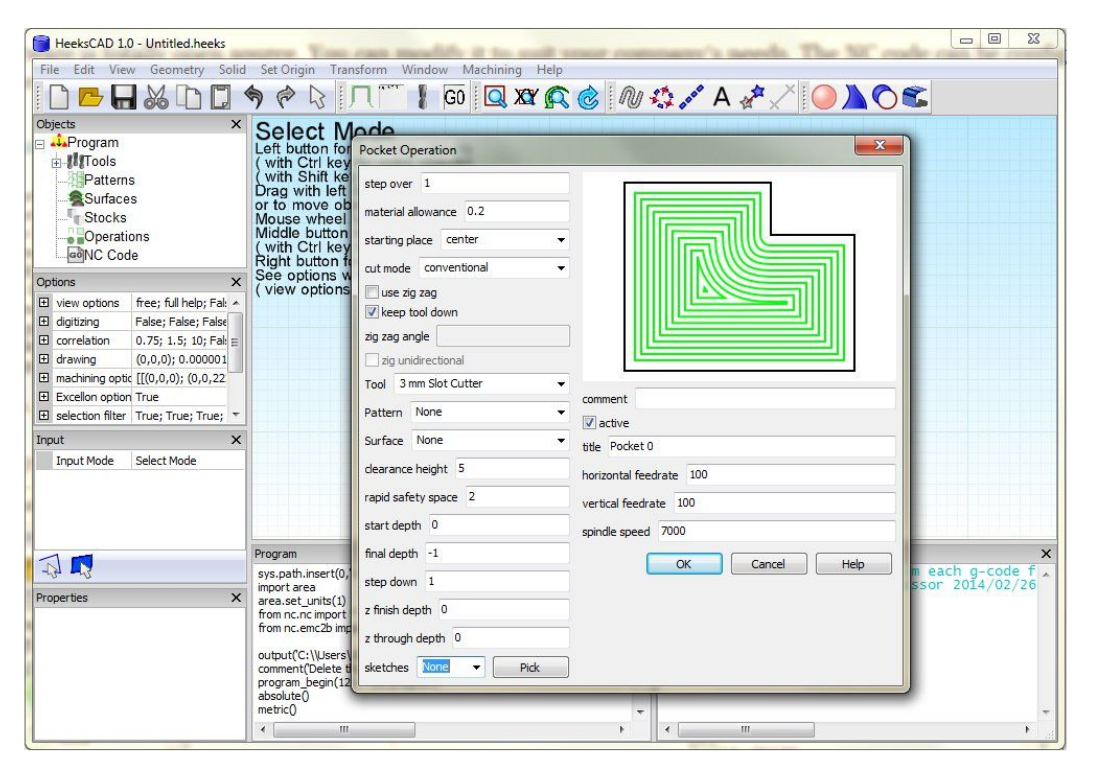
HeeksCAD fork is established much better in its CAM part and it allows creating the control software on the base of the model/drawing.
HeeksCAD fork is established much better in its CAM part and it allows creating the control software on the base of the model/drawing.
Numerical control
What exactly controls motion axis of machine-tool, mill or other tool of the machine?

Dedicated DSP controller of the NC machine tool with a USB port for a flash drive and a machine. These are either accessory boards for the single-board computer (Raspberry PI, BeagleBoard) to control electric drive and spindle, or ordinary PC with LPT port or PCI/PCIe accessory board to interface with the machine electronics.
The hero of the day is a PC. Because you can control the machine and interpret g-code using the open source software LinuxCNC.

The software based on the Linux kernel real-time. Its fork Machinekit (for ARM ready-to-use iso image) is used for the Raspberry PI, BeagleBoard Black single-board computers. There is a Machinekit build for the single-board C.H.I.P. at the price of 9$.
LinuxCNC is a constructor and you can build almost any configuration on its base. This software controls both hobby-use machines and huge industrial NC machine tools. It is used not only for upgrading industrial NC machine tools, but also for the newly developed machine tool.
LinuxCNC is a constructor and you can build almost any configuration on its base. This software controls both hobby-use machines and huge industrial NC machine tools. It is used not only for upgrading industrial NC machine tools, but also for the newly developed machine tool.

Part of its components works in a real-time process, less critical part works in the environment with unscheduled delays. It is possible to extend internal logic of the response to events in the LinuxCNC using LD diagrams, and even shell scripts, or command line programs.
Control the machine using java and groovy
Instead of its GUI component we’ll try to control the NC machine tool through the external API using software technologies usual for us. Those who are interested in this idea could find my PoC Apache Camel component and JVM library on the github.
There is set of solutions for IoT based on java, frequently they are servers for IoT gateways. Now it is possible to integrate LinuxCNC control of the machine into the complex cloud-based automation scripts with the Internet access. It is no trouble to build the working solution using thousands of ready-made components in this constructor with Eclipse Kura, Apache Camel. You can integrate computer vision libraries and add matching components or camera/network image capture tools.
Let’s start with a little java example. We’ll use API to send commands to control the machine. The library sends telnet commands to the linuxcncrsh process from the LinuxCNC/Machinekit.
There is set of solutions for IoT based on java, frequently they are servers for IoT gateways. Now it is possible to integrate LinuxCNC control of the machine into the complex cloud-based automation scripts with the Internet access. It is no trouble to build the working solution using thousands of ready-made components in this constructor with Eclipse Kura, Apache Camel. You can integrate computer vision libraries and add matching components or camera/network image capture tools.
Let’s start with a little java example. We’ll use API to send commands to control the machine. The library sends telnet commands to the linuxcncrsh process from the LinuxCNC/Machinekit.
//maven dependency com.github.igor-suhorukov:camel-gcode:0.1
import com.github.igorsuhorukov.gcode.GCodeClient;
public class Gcode {
public static void main(String[] args) throws Exception{
String hostname = "beaglebone.local"; int port = 5007;
try (GCodeClient gCodeClient = new GCodeClient(hostname, port)){
System.out.println(gCodeClient.login("EMC", "JVM", "1.0"));
gCodeClient.sendCommand("set mode manual");
gCodeClient.sendCommand("set estop off");
gCodeClient.sendCommand("set machine on");
for(int axis=0; axis<4; axis++)
gCodeClient.sendCommand("set home " + axis);
System.out.println(gCodeClient.sendCommand("get abs_act_pos"));
gCodeClient.sendCommand("set mode mdi");
gCodeClient.sendCommand("set mdi g0 x3 y4");
gCodeClient.sendCommand("set mdi g0 x5 y2");
}
}
}
This example moves the gantry/portal at the idle full speed first to the (3; 4) position, then to the (5; 2) position.
The next example is a Groovy program based on Apache Camel framework and com.github.igor-suhorukov:camel-gcode component for sending commands for the machine.
The next example is a Groovy program based on Apache Camel framework and com.github.igor-suhorukov:camel-gcode component for sending commands for the machine.
 |
| CamelCNC.groovy |
To run it use command: java -jar groovy-grape-aether-2.4.5.4.jar CamelCNC.groovy
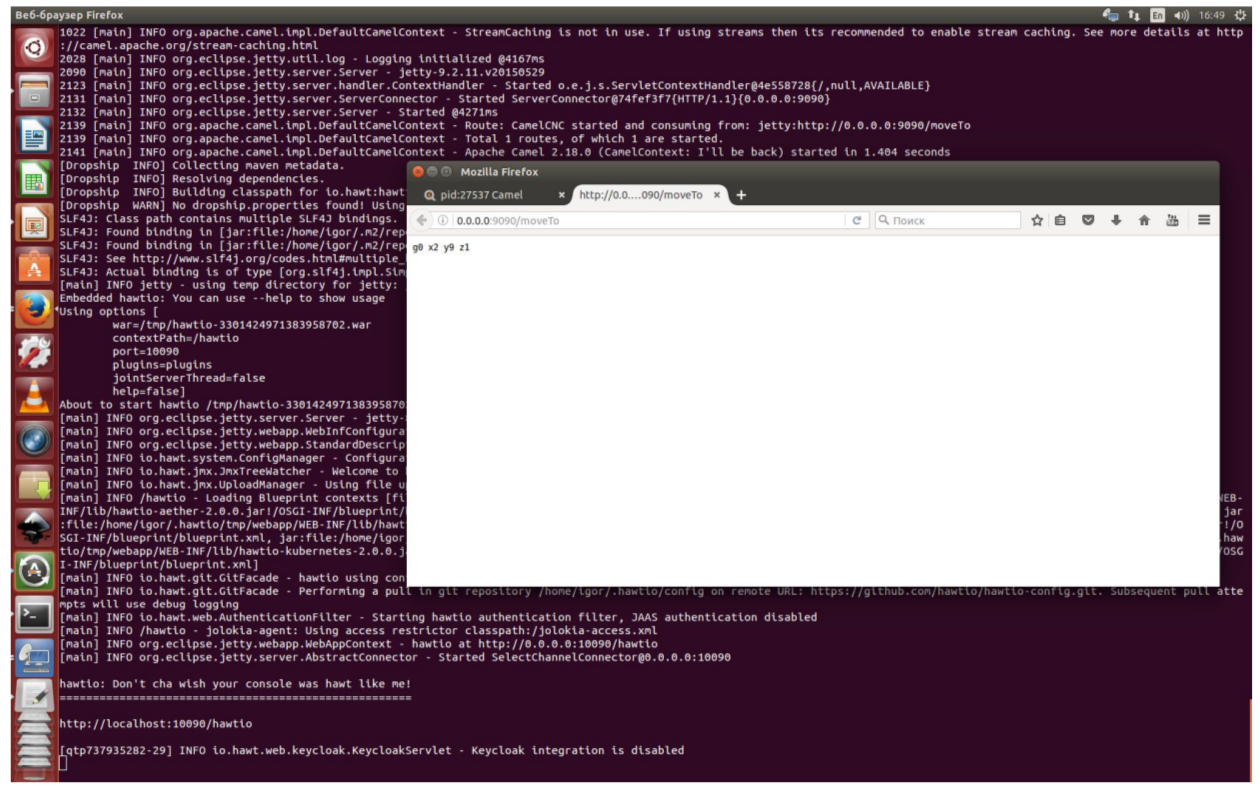
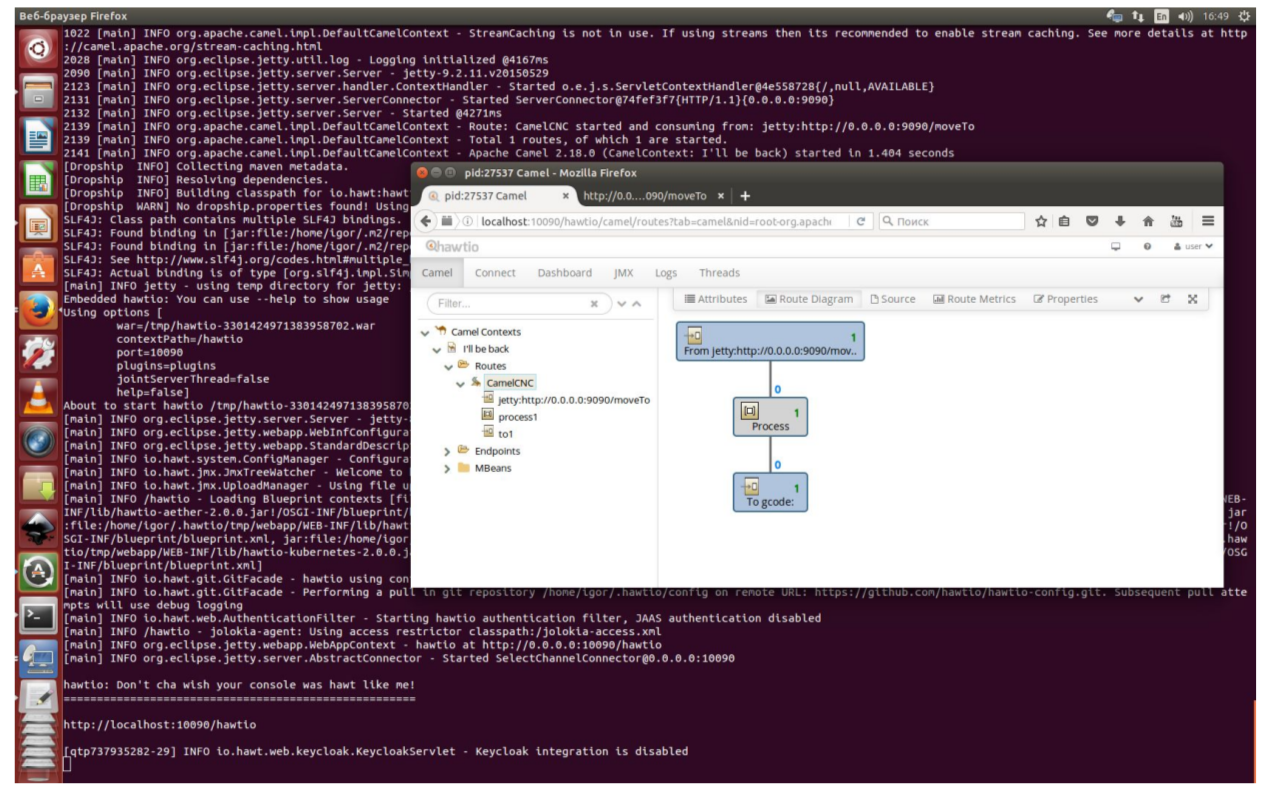
In this example the Groovy application links jetty and gcode components, build a rout to the groovy DSL camel, and load and run Web Console for HawtIo monitoring. At each http request at HOST:9090/moveTo the new command to move at the random positions along the X and Y axis is created and started to the LinuxCNC and machine to be complete. Then the generated command returns to the client as an http response. Web Console listens at the :10090/hawtio address.
The Apache Camel, Groovy and HawtIo magic will help you to make quite complex things easy.
The perfect future...
We can try to predict the future.
We can distinguish a trend: all things that could be automatized when it makes economic sense to do, they are automatizing. Recently there has been news about Foxconn in China: 40000 machines at manufacture cause the mass layoff. Most of the machine details they produce themselves as well as driver electronics.
I’m not the Nostradamus, but it is borne in on that automatization destroys workplaces in times to come. It is also quite clear that demand for automatization of production will increase with time. And people who are familiar with these technologies will be still more sought-after at the labor market, but only up to a point… And individual production at the NC machine tool will come in every workshop.
What will be the future like?
Will the robots enslave or destroy humanity?

Or people will still control robots.
It depends on us and our skills and decisions today!!!
Conclusion
A lot of things that we make with our hands and routine tasks usually could be automatized. In this case we should start with the design of the model. The next step is to turn the model into the control program for the machine. These commands will be executed by some kind of the NC machine and all elements in the production process that are reasonable to automatize should be automatized. The computer vision technologies and feedback sensors should be used too. Surely it is unacceptable to run between computer and machine with a flash drive, the commands shall be transmitted through the network.
Let the machine make all the work. But to prevent NC machine tool become twins from the box you have to learn technologies and have a good handle in process details. Or you’ll have to share financial resources with those who understand these technologies and have a different result from the one you have been needed.
Читать на русском.





